Target Guidance is used for having an object guided towards a target.
The typical application is having a missile intercepting a target. The missile can be launched from the ground (Surface-To-Air missile, SAM) or from an aircraft (Air-to-Air missile, AAM).
Target guidance is selected by setting “Target Type” to TARGET, and selecting a game object as the “Target”.
This page contains the settings specific for target guidance. The main setting is Guidance Algorithm. This changes the principles of guidance towards a target.
Target Guidance Principles
The most important choice is which guidance algorithm to choose. The choices are: Proportional Navigation (PN)/Augmented PN (APN), Line of sight (LOS) and constant bearing. For an introduction to PN and LOS read this.
The are advantages and drawbacks to each method. PN can be used at long range but can be jammed. LOS on the other hand is limited in range but is very hard, in many cases practically impossible, to jam.
Proportional Navigation/Augmented Proportional Navigation
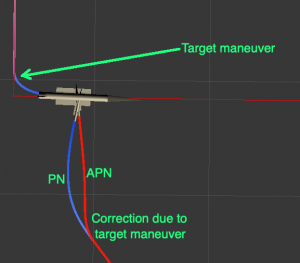
This method keeps the bearing between the missile and target constant, which ensures intercept in most conditions. Augmented PN also takes into account target maneuvers. If the target flies in straight line with constant speed the two methods are identical.
Typically used in long range SAM systems and AAM. If the missile has a target seeker it most likely is PN. For modern systems APN is used, although all real world implementations are most likely heavily modified and adjusted to the exact application.
Examples of missiles using PN/APN are AIM-9 Sidewinder, Stinger and IRIS-T.
When the target maneuvers, APN immediately corrects with its own maneuver and then flies straight for the target. PN on the other hand only reacts to the change in bearing to the target and corrects slower and more gradually
Line of sight
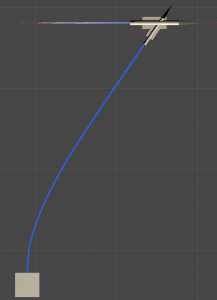
This guidance method keeps the missile on the line between the sight, i.e. launch position, and the target. This line is line of sight (LOS).
Almost exclusively used in short range SAM systems and anti-tank missiles.
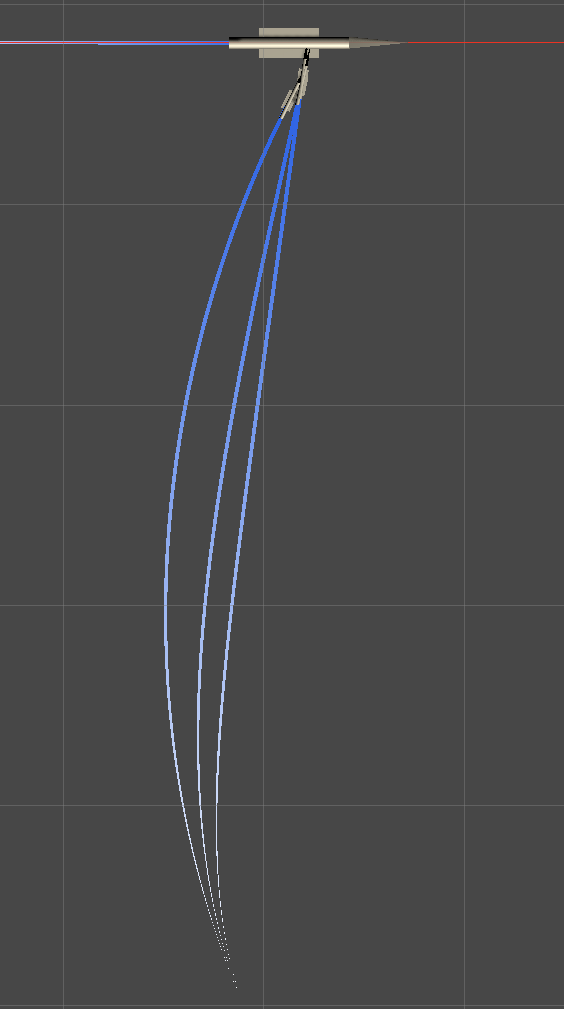
In the image missiles are launched with time intervals from the same position. Each missile is kept on the line (red) between launch position and target. The result is ever increasing lead angle (the angle between missile velocity/body and LOS). The bottom missile almost points straight at the target while the top one points ant the intercept point. Note the continuous curve (blue) of the missile trajectory, compared to proportional navigation.
Ideally, line of sight guidance do not have to maneuver much more than the target, unlike PN where the missile has to maneuver at least 3 times more (depending on navigation constant).
Examples of missiles using LOS guidance are RBS 70, Starstreak, RBS 56 BILL and MILAN.
In nature there are examples where predators uses the same principles.. They use this to limit their apparent movement against the background. This is done to avoid being seen by the prey. See this article for references.
Constant Bearing
This guidance method keeps the bearing between the missile and target constant, i.e. the angle between the line from missile to target and north is constant. Another name is “Parallel Navigation”.
Note the constant direction of the red line going through both target and missile.
This is rarely used in the real world. It is not very practical with the types of sensors typically available.
It has been shown that some animals, predators, use it in nature. It can be shown to be optimal for erratically moving targets, under some specific assumptions.
Usage
Basic usage is simple. Select the target and choose the right guidance principle.
The specific parameters for path following are shown below. Many other general parameters are also used, see other sections for those.
| Parameter | Description | Details |
|---|---|---|
| Navigation Constant | This determines how fast the missile turn towards the intended direction. It is generally called N in literature. See Proportional Navigation. | Float. Typically in the range 2-6. |
| Time to path | In the background path following algorithms are used. See Path Following for detailed information. Basically, a low value will make the missile converge towards the correct path faster. | Not applicable for PN/APN. |
| Elevated Trajectory | Elevates the trajectory in the middle of the trajectory. Very common in real world examples for long range missiles. | Under development. more settings in future releases. |
Navigation Constant
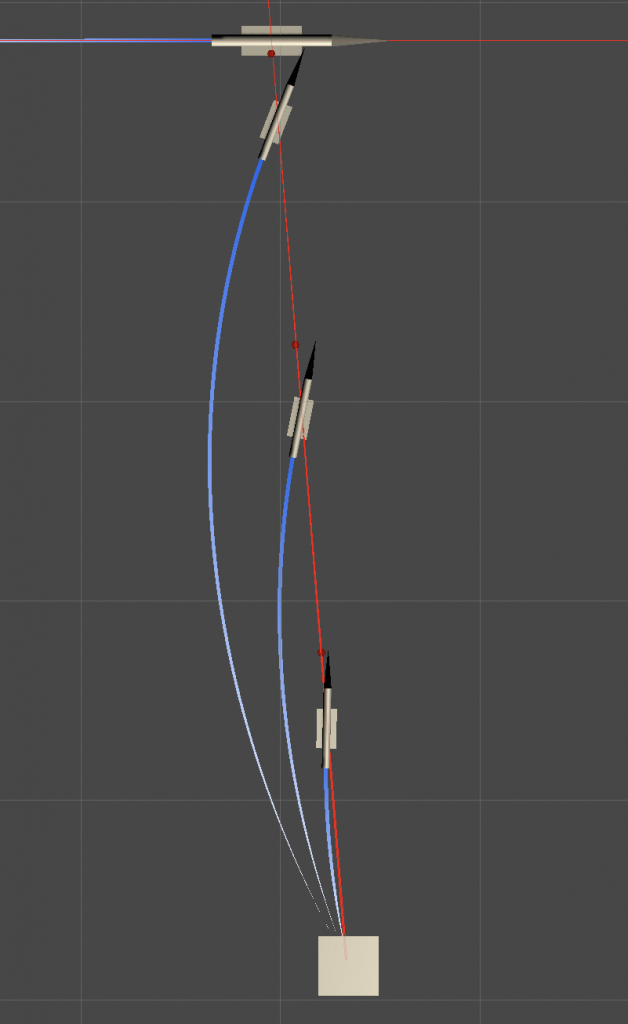
The navigation constant determines how fast the missile should maneuver towards its intended direction.
See image. Using a low value, 2, it takes more time to achieve the straight intercept course than it takes for a high value, 7.
The navigation constant is typically in the range 2-6. It should never be below 2, since intercept can no longer be guaranteed..
Having a high value creates high accelerations initially and when the target maneuvers. This might not be desirable, and can, if not being careful, lead to unstable behavior.
APN
Value from left to right: 2, 4, 7
Elevated Trajectory
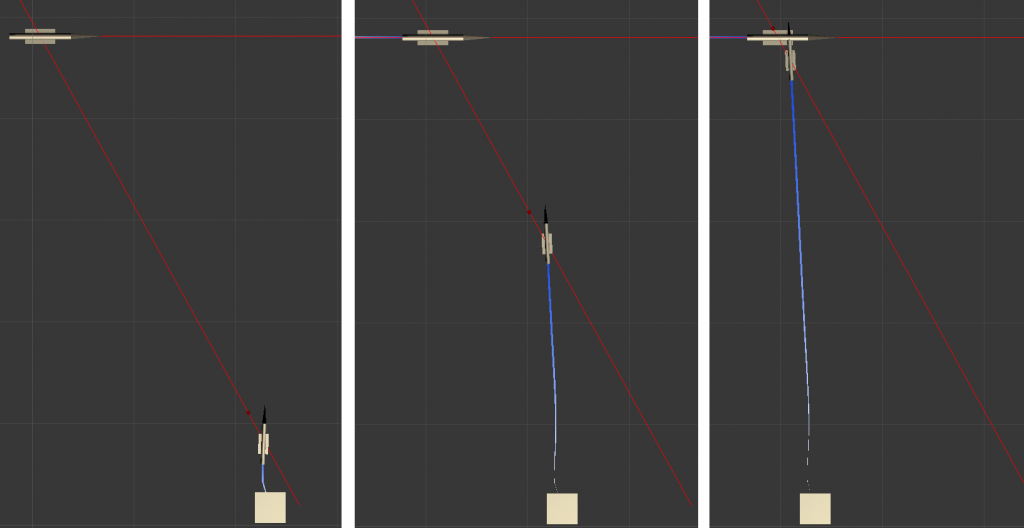
Many missiles employ an elevated trajectory, so called “loft”. This is used to increase range and provided better intercept geometries. The increased range is achieved by flying at a higher altitude, where the drag is lower. Examples of missiles that likely use this tactic: AIM-54 Phoenix, Meteor, AIM-120 AMRAAM and R-77.

Below is trajectory profiles, see from the side, for launches from various distances.
This feature is under development and will have more settings available in the future.